如果你经常关注机器人,你无疑会遇到关于轮子还是腿的争论。例如,为什么仓库应该选择有腿的Digit机器人,而不是滚动的Locus系统?无人机的爆炸式普及也引发了与飞行类似的争论。最近对库存自动化的兴趣引发了无人机和滚动系统在处理高货架方面的类似争论。
机器人往往是为了一个单一的目的而建造的。这意味着他们在一件事上做得特别好(希望如此),但教现有的机器人新技巧是很困难的。软件和人工智能只能在硬件有内置限制的情况下走得这么远。同时,构建通用甚至多用途系统说起来容易做起来难。

图片来源:自然通讯
因此,机器人专家正在做机器人专家通常做的事情:从大自然中寻找灵感。毕竟,动物和人类在环境需要时往往非常善于适应。六月底的一篇论文详细介绍了Multi-Modal Mobility Morphobot机器人系统。考虑到这个名字有点绕口令,听起来像80年代末的忍者神龟仿冒品,我们将遵循他们的领导,并将其称为M4。
这篇论文详细介绍了一系列不同的生物学灵感。有一种海狮,它用鳍状肢游泳和走路;猫鼬用后腿站立以防备危险;还有楚卡鸟(chukar bird)(对我来说是新认识的——这是一种主要生活在亚洲和欧洲的鹧鸪),它们在爬上斜坡时依靠翅膀来辅助和平衡。
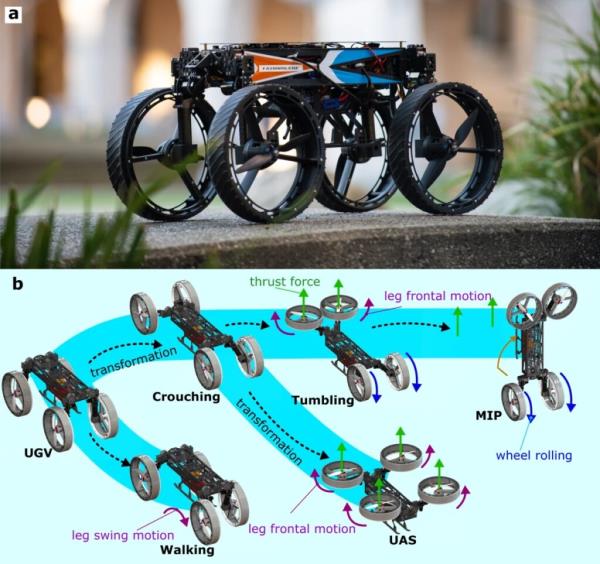
M4的核心是由碳纤维和3d打印部件制成的铰接式车身,可根据需要调整形状。这包括四个四轴飞行器风格的旋翼,也有轮子的功能。
该论文的作者写道:“为了证实M4的运动可塑性,我们进行了几个实验,包括轮式运动、飞行、MIP、蹲伏、物体操纵、四足运动、推进器辅助的MIP在陡坡上的运动,以及在大型障碍物上翻滚。”此外,为了证明M4的设计是可扩展的,并且可以实现支持独立操作的有效载荷能力,我们在M4中使用车载传感器和计算机测试了完全自主的多模式路径规划。”
团队设置了障碍物,要求M4在行进中适应。具体形式完全取决于地形,但也有其他因素在起作用。例如,飞行是爬上斜坡最直接的方式,但它比滚动需要更多的力量。在这种情况下,系统使用两种模式:两个轮子在斜坡上滚动,而两个转子辅助移动(参见:chukar鸟)。

图片来源:自然通讯
这是一个聪明的设计,尽管在很多情况下它可能是过度杀伤。有很多任务只依靠轮子、转子或腿就能完成得很好。该团队指出,地震和洪水等自然灾害后的搜索和救援任务是一个潜在的应用。
“在洪水等特殊事件之后,一个事件可能伴随着另一个事件,以不同的方式破坏景观,”该论文称。飓风可能会造成洪水和对道路和建筑物的风力破坏。或者,山体滑坡可能导致大块岩石沿着斜坡向下移动,阻塞河流,造成洪水。在这些情况下,M4可以利用其多功能性来实现适应搜索和救援不同任务要求的机动性。”